近日,国家自然科学基金委公布了2023年度区域创新发展联合基金评审结果。我校李秦川教授牵头申报的“大型变曲率结构件编织机器人装备设计理论与方法”和陈建能教授牵头申报的“名优茶全天候采摘机器人的眼脑手自主协调方法研究”获得资助。
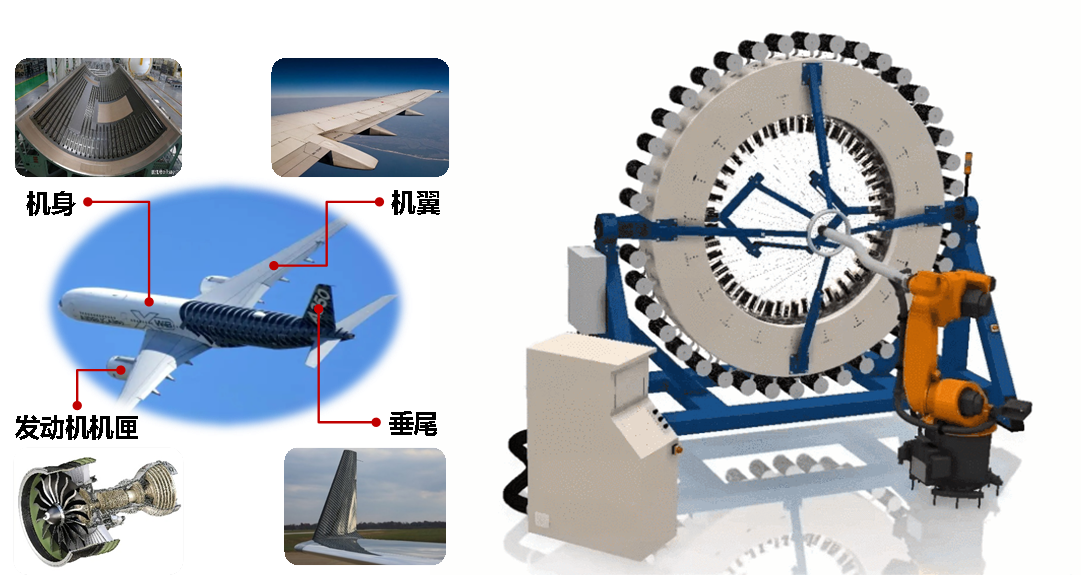
李秦川教授主持的“大型变曲率结构件编织机器人装备设计理论与方法”,面向国家重大需求和机构学国际学术前沿,研究变曲率结构件编织过程建模与性能调控、高刚度大转动空间混联机器人构型综合与设计、混联编织机器人运动规划与控制,混联编织机器人刚-柔-软多体系统耦合动力学建模与抑振,揭示大型变曲率结构件混联机器人编织装备-工艺交互作用机理,阐明混联机器人编织装备刚-柔-软复杂系统的动力学耦合机制,发明满足编织工艺要求的冗余运动混联机器人新构型,最终形成编织机器人系统“工艺-构型-控制”一体化设计理论与方法体系,具有重要科学价值和工程意义。
陈建能教授主持的“名优茶全天候采摘机器人的眼脑手自主协调方法研究”,围绕名优茶采摘机器人开展深入研究,实现名优茶智能化采摘从不可能到可能,从可能到可行,从可行到可用、好用。项目拟研究用于提取不同时空生长条件名优茶嫩梢特征方法,以提高全天候嫩梢检测模型的适应性;研究不完备特征条件下采茶机械臂的视觉伺服控制方法,实现嫩梢的手眼协调精确定位;研究模拟手工采摘嫩梢的手脑协调方法及双工位柔性采摘机械手,开展眼脑手自主协调采摘试验。这些科学问题的解决将为智慧农业智能机器人应用提供科学理论依据和技术支撑,对其他作物的采摘机器人的研究具有普遍意义。

截至目前,我校共获批2023年度国家自然科学基金项目95项,其中联合基金重点项目2项、面上项目36项、青年项目50项,外国学者研究基金项目3项,国际(地区)合作与交流项目4项。项目立项数首次突破九十大关,创造学校以往年份获批项目数量历史新高,资助率也突破近年来最好成绩。
近年来,学校高度重视国家自然科学基金的申报和实施工作,精心组织,整体部署,申报数量和质量逐年提升。特别是在统一组织下扎实推进国家自然科学基金专项提升计划,累计组织自然科学学术活动月系列学术讲座两百余期,邀请校内外专家对申报材料问症把脉、一对一指导等措施提高申报书质量。
今年是我校实施“十四五”规划承上启下的关键之年,我校国家自科基金项目立项数实现新的突破,为我校“十四五”科研工作高质量推进奠定了良好基础。后续,我校将以此次历史性突破为契机,不断加强学科优势特色方向培育,推动平台和团队建设,创造有利于基础研究的良好科研生态,继续加大力度,为教师提供更好的条件,充分激发教师科研的激情和创新的潜力,鼓励教师勇于挑战基础前沿难题,进一步提升我校综合竞争力。







